
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Artikel untuk memahami perbezaan antara motor stepper dan servo dan motor servo
I. Perbezaan antara motor stepper dan servo dan motor servo
Stepper Motor: Adakah isyarat denyut elektrik ke dalam anjakan sudut atau anjakan garis bahagian-bahagian motor stepper elemen gelung terbuka. Ringkasnya, ia bergantung pada isyarat nadi elektrik untuk mengawal sudut dan bilangan giliran. Jadi dia hanya bergantung pada isyarat nadi untuk menentukan berapa banyak putaran. Oleh kerana tidak ada sensor, sudut berhenti boleh menyimpang. Walau bagaimanapun, isyarat nadi yang tepat meminimumkan sisihan.
Servo Motor: Bergantung pada litar kawalan servo untuk mengawal kelajuan motor, melalui sensor untuk mengawal kedudukan putaran. Jadi kawalan kedudukan sangat tepat. Dan kelajuan putaran juga berubah -ubah.
Servo (Servo Elektronik): Komponen utama servo adalah motor servo. Ia mengandungi litar kawalan motor servo + set gear pengurangan. Oh yeah, motor servo tidak mempunyai set gear pengurangan. Dan servo mempunyai set gear pengurangan.
Dalam kes servo had, ia bergantung pada potentiometer di bawah aci output untuk menentukan sudut stereng lengan kemudi. Kawalan isyarat servo adalah isyarat denyutan nadi (PWM), di mana mikrokontroler dapat dengan mudah menjana isyarat ini.
Ii. Prinsip Asas Motor Stepper
Bagaimana ia berfungsi:
Biasanya pemutar motor adalah magnet kekal, dan apabila arus mengalir melalui lilitan stator, giliran stator menghasilkan medan magnet vektor. Medan magnet ini akan memacu pemutar untuk berputar dengan sudut, supaya arah sepasang medan magnet pemutar akan sama dengan arah medan magnet stator. Apabila medan magnet vektor stator berputar dengan sudut. Rotor juga berputar dengan sudut dengan medan magnet ini. Bagi setiap nadi elektrik input, motor berputar satu langkah sudut ke hadapan. Anjakan sudut output adalah berkadar dengan bilangan denyutan input, dan kelajuan putarannya berkadar dengan kekerapan denyutan. Dengan menukar susunan di mana belitan bertenaga, motor membalikkan. Oleh itu, bilangan dan kekerapan denyutan dan susunan tenaga belitan setiap fasa motor boleh dikawal untuk mengawal putaran motor stepper.
Prinsip Generasi Haba:
Biasanya melihat semua jenis motor, dalaman adalah teras besi dan gegelung penggulungan. Rintangan penggulungan, kuasa akan menghasilkan kerugian, saiz kerugian dan rintangan dan arus adalah berkadar dengan persegi, yang sering dirujuk sebagai kehilangan tembaga, jika arus bukanlah DC standard atau gelombang sinus, juga akan menghasilkan kerugian harmonik; Teras mempunyai kesan semasa histeresis eddy, dalam medan magnet bergantian juga akan menghasilkan kerugian, saiz bahan, semasa, kekerapan, voltan yang berkaitan, yang dipanggil kehilangan besi. Kehilangan tembaga dan kehilangan besi akan ditunjukkan dalam bentuk penjanaan haba, sehingga mempengaruhi kecekapan motor. Motor melangkah secara amnya mengejar ketepatan kedudukan dan output tork, kecekapan adalah agak rendah, arus umumnya lebih besar, dan komponen harmonik adalah tinggi, kekerapan semasa berselang -seli dengan kelajuan dan perubahan, jadi motor melangkah umumnya mempunyai keadaan haba, dan keadaan lebih serius daripada motor AC umum.
Iii. Pembinaan kemudi
Servo terutamanya terdiri daripada perumahan, papan litar, motor pemacu, pengurangan gear dan elemen pengesanan kedudukan. Prinsip kerjanya adalah bahawa penerima menghantar isyarat kepada servo, dan IC di papan litar memacu motor yang tidak berkesudahan untuk mula berputar, dan kuasa dihantar ke lengan swing melalui gear pengurangan, dan pada masa yang sama, pengesan kedudukan menghantar isyarat kembali untuk menentukan sama ada ia telah tiba di kedudukan atau tidak. Pengesan kedudukan sebenarnya adalah perintang yang berubah -ubah. Apabila servo berputar, nilai perintang akan berubah dengan sewajarnya, dan sudut putaran dapat diketahui dengan mengesan nilai perintang. Motor servo umum adalah dawai tembaga nipis yang dibalut oleh pemutar tiga tiang, apabila arus mengalir melalui gegelung akan menghasilkan medan magnet, dan pinggir magnet pemutar untuk menghasilkan penolakan, yang seterusnya menghasilkan daya putaran. Menurut fizik, momen inersia objek adalah berkadar terus dengan jisimnya, jadi semakin besar jisim objek yang akan diputar, semakin besar daya yang diperlukan. Untuk mencapai kelajuan putaran yang cepat dan penggunaan kuasa yang rendah, servo diperbuat daripada wayar tembaga nipis yang dipintal ke dalam silinder berongga yang sangat nipis, membentuk pemutar berongga yang sangat ringan tanpa tiang, dan magnet diletakkan di dalam silinder, yang merupakan motor cawan berongga.
Untuk memenuhi persekitaran kerja yang berbeza, terdapat servos dengan reka bentuk kalis air dan debu; Dan sebagai tindak balas kepada keperluan beban yang berlainan, terdapat plastik dan gear logam untuk servos, dan gear logam untuk servos pada umumnya torque tinggi dan berkelajuan tinggi, dengan kelebihan bahawa gear tidak akan terkelupas kerana beban yang berlebihan. Servos gred yang lebih tinggi akan dilengkapi dengan galas bola untuk menjadikan putaran lebih cepat dan lebih tepat. Terdapat perbezaan antara satu galas bola dan dua galas bola, sudah tentu dua galas bola lebih baik. Servis FET baru terutamanya menggunakan FET (Transistor Kesan Medan), yang mempunyai kelebihan rintangan dalaman yang rendah dan oleh itu kurang kerugian semasa daripada transistor biasa.
Iv. Prinsip operasi servo
Dari gelombang PWM ke dalam litar dalaman untuk menghasilkan voltan bias, penjana kontaktor melalui gear pengurangan untuk memacu potentiometer untuk bergerak, supaya apabila perbezaan voltan adalah sifar, motor berhenti, untuk mencapai kesan servo.
Protokol untuk servo pwms adalah sama, tetapi servos terkini untuk muncul mungkin berbeza.
Protokol umumnya: lebar tahap tinggi dalam 0.5ms ~ 2.5ms untuk mengawal servo untuk menghidupkan sudut yang berbeza.
V. Bagaimana Motor Servo Berfungsi
Angka di bawah menunjukkan litar kawalan motor servo yang dibuat dengan penguat operasi kuasa LM675, dan motor adalah motor servo DC. Seperti yang dapat dilihat dari angka, penguat operasi kuasa LM675 dibekalkan oleh 15V, dan voltan 15V ditambah kepada input fasa penguat operasi LM675 melalui Rp 1, dan voltan output LM675 ditambah kepada input motor servo. Motor ini dilengkapi dengan penjana isyarat pengukuran kelajuan untuk pengesanan masa nyata kelajuan motor. Malah, penjana isyarat kelajuan adalah sejenis penjana, dan voltan outputnya berkadar dengan kelajuan putaran. Output voltan dari penjana isyarat pengukuran kelajuan G dibebaskan kembali kepada input pembalikan penguat operasi sebagai isyarat ralat kelajuan selepas litar pembahagi voltan. Nilai voltan yang ditetapkan oleh perintah kelajuan potensiometer RP1 ditambah kepada input fasa penguat operasi selepas pembahagian voltan oleh R1.R2, yang bersamaan dengan voltan rujukan.
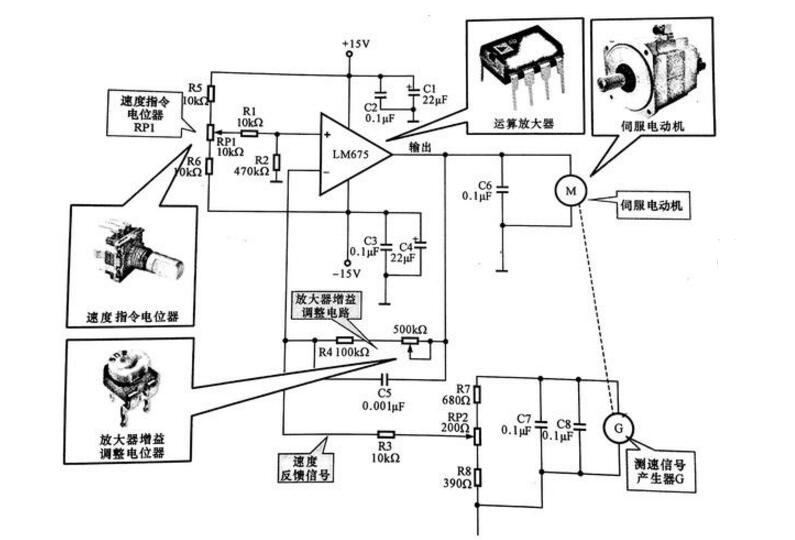
Kawalan skema motor servo
Servomotor: Ditunjukkan oleh huruf M untuk servomotor, ia adalah sumber kuasa untuk sistem pemacu. Penguat Operasi: Ditandai dengan nama litar, iaitu, LM675, adalah sekeping penguat dalam litar kawalan servo yang menyediakan arus pemacu untuk motor servo.
Speed Command Potentiometer RP1: Menetapkan voltan rujukan penguat operasi dalam litar, iaitu tetapan kelajuan. Penguat Keuntungan Potentiometer RP2: Digunakan dalam litar untuk menyempurnakan keuntungan penguat dan saiz isyarat maklum balas kelajuan.
Apabila apabila beban motor berubah, voltan yang diberikan kembali kepada input terbalik bagi penguat operasi juga berubah, ia, apabila beban motor meningkat, kelajuan berkurangan, dan voltan output daripada penjana isyarat kelajuan juga berkurangan, sehingga voltan -voltan pada input yang disuntik penguat operasi menurun dan pengaliran yang berlainan Sebaliknya, apabila beban menjadi lebih kecil dan kelajuan motor meningkat, voltan output penjana isyarat pengukuran kelajuan meningkat, voltan maklum balas yang ditambah kepada input terbalik penguat operasi meningkat, perbezaan di antara voltan ini dan voltan rujukan berkurangan,


